
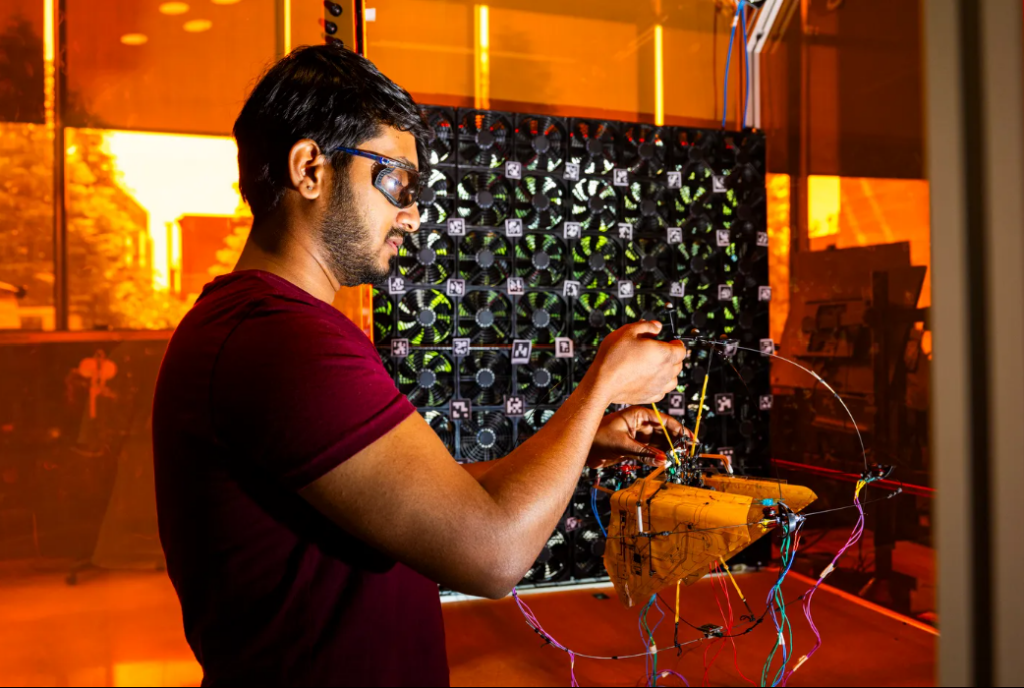
Alireza Ramezani isn’t just fascinated by bats – he builds them as reported by Northeastern University.
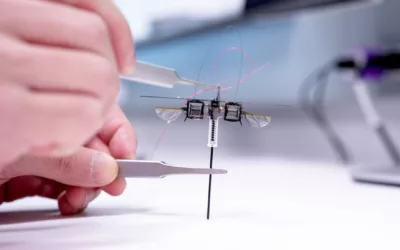
Ramezani, an associate professor of electrical and computer engineering, has developed Aerobat, a cutting-edge robot inspired by the unique flight capabilities of bats. Despite its small size, Aerobat is designed to tackle a significant challenge in robotics: navigating tight, confined spaces.
According to Ramezani, current robotic technologies struggle to explore environments like sewer tunnels or HVAC systems. Ground-based robots are too slow, and traditional aerial drones, such as quadcopters, are not optimized for confined spaces. The powerful air jets from their rotors, while effective outdoors, make them unstable in enclosed areas. Aerobat addresses this issue with a design that mimics the wings of a bat, allowing it to hover and maneuver in tight spaces, potentially revolutionizing how we explore and monitor difficult-to-access environments.
“We’ve got 1.2 million miles of sewer galleries just in the U.S. that are not easy to access, not safe, and they are not the most desirable environments where we as human operators want to be operating,” Ramezani says. “We have mines, we have caves for exploring natural resources. The point is we are surrounded by confined environments, and we don’t have fast robots that can help us with remote sensing and other applications.”
So, why base Aerobat on bats? Ramezani notes that bats, the only mammals capable of true flight, possess exceptional wing control and flight stability, surpassing even birds. They can manipulate their fluidic environment in ways that traditional drones cannot, making them an ideal model for Aerobat’s design.
The core innovation behind Aerobat lies in its wing structure, which is inspired by a bat’s ability to dynamically reshape its wings. This concept, known as morphing, allows bats to optimize their flight by expanding their wings during a downstroke to maximize lift and collapsing them during an upstroke to reduce air resistance. Ramezani’s earlier prototype, Bat Bot, introduced in 2017, lacked this dynamic morphing capability, but the latest iteration of Aerobat incorporates these lessons from nature.
“This enhances the efficiency of flight,” says Ramezani. “We tried to capture this behavior in the design of Aerobat.”
Aerobat operates autonomously, using a built-in camera to capture visual data and determine its position and orientation within its environment. While a human operator sets the destination, Aerobat independently handles flight control and path planning to reach its target.
Though Aerobat doesn’t yet fully replicate a bat’s flexible wing digits, Ramezani is already looking ahead to future iterations that could incorporate this feature. His work is set to advance even further, thanks to the additional funding he’s received through an NSF CAREER award, which will support the continued development of Aerobat’s capabilities over the next five years.
Ramezani envisions a future where fleets of Aerobats operate in urban environments, providing vital data from hard-to-reach places.
“You can think of a number of these vehicles that are planned to operate in some region in some city sewer galleries,” Ramezani says. “You just deploy them and they fly around and gather information.”