
When it comes to powering robots, the energy density of chemical fuels is unmatched. While batteries offer clean and quiet energy sources that are easy to integrate into electrically powered robots, they fall short in terms of energy density when compared to chemical fuels like methanol or butane. While larger robots can simply carry more batteries, this approach becomes impractical as we venture into the realm of insect-size or smaller robots. It’s not just the batteries that pose a challenge; electric actuators also struggle to scale down effectively, especially when high power generation is required.
In a recent study published in the journal Science, researchers from Cornell University have taken an approach to address the actuation challenge for small-scale robots. They have developed an incredibly tiny yet highly efficient internal combustion engine. This innovative engine operates by injecting methane vapor and oxygen into a soft combustion chamber, where a tiny spark ignites the mixture. Within just half a millisecond, the top of the chamber expands like a piston, generating remarkable forces of 9.5 newtons. This cycle can be repeated an astounding 100 times per second. When two of these actuators are used to drive two legs each, the result is an exceptionally powerful and flexible soft quadruped robot.
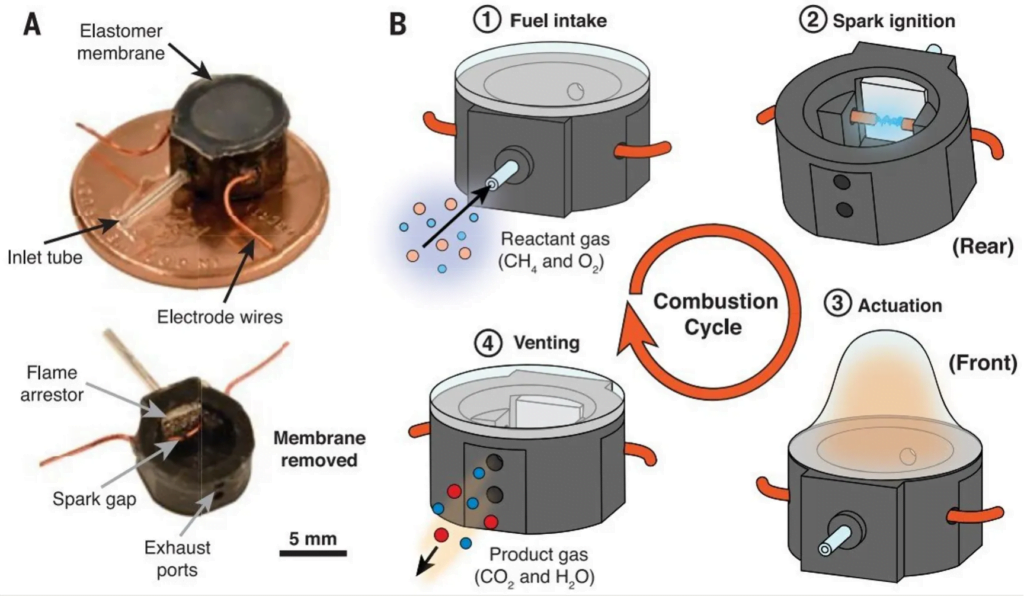
What sets this technology apart is its size and weight. Each of the two actuators powering this robot weighs just 325 milligrams and is approximately a quarter of the size of a U.S. penny. The reason for this miniaturization is the off-board placement of most associated components, including the fuel source, the fuel mixing and delivery system, and the electrical source for the spark generator. Even without these components, the actuator remains highly efficient and can operate continuously at high cycle frequencies without overheating.
One of the main challenges faced by this actuator is its exposure to actual explosions. Therefore, careful design considerations are crucial to ensure that it doesn’t damage itself during operation. Several factors contribute to its durability, including the small combustion volume, flame-resistant elastomer material, and an integrated flame arrestor. Remarkably, this actuator can operate continuously for more than 750,000 cycles (equivalent to 8.5 hours at 50 hertz) without any decline in performance.
Robert F. Shepherd, head of the Organic Robotics Lab at Cornell, highlights the power of small-scale combustion, emphasizing that this research operates at the lower limits of combustible gas volumes. It’s an intriguing area for both science and engineering, offering useful outcomes.
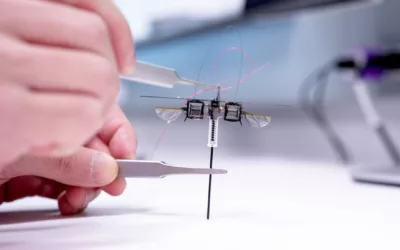
The engineering outcome showcased here is a tiny insect-scale quadrupedal robot powered by two of these soft-combustion actuators. This diminutive robot measures just 29 millimeters in length and weighs a mere 1.6 grams. However, its capabilities are astonishing. It can jump an impressive 59 centimeters vertically and walk while carrying a load 22 times its weight. For an insect-scale robot, this performance is near the level of actual insects in terms of jumping height, speed, and carrying capacity.
The actuation system is equally innovative. Each actuator controls one side of the robot, with one combustion chamber connected to chambers at each foot through elastomer membranes. This gas pressure-based power source allows the robot to move forward by firing both actuators simultaneously while firing one side or the other enables rotation and directional control.
Shepherd notes that achieving controlled slow movements is a challenge they aim to tackle next. By trading speed for force, they hope to create robots that can both walk gracefully and perform dynamic movements such as running and jumping. Additionally, finding ways to untether these systems is on their agenda. The researchers are also considering using aggregates of these small yet potent actuators as large, variable recruitment musculature in large robots, paving the way for dexterous and fast land-based hybrid robots.
This research not only showcases the potential of tiny robots but also may open doors to imagining large robots powered by thousands of these miniature explosions—a truly remarkable frontier in robotics.