
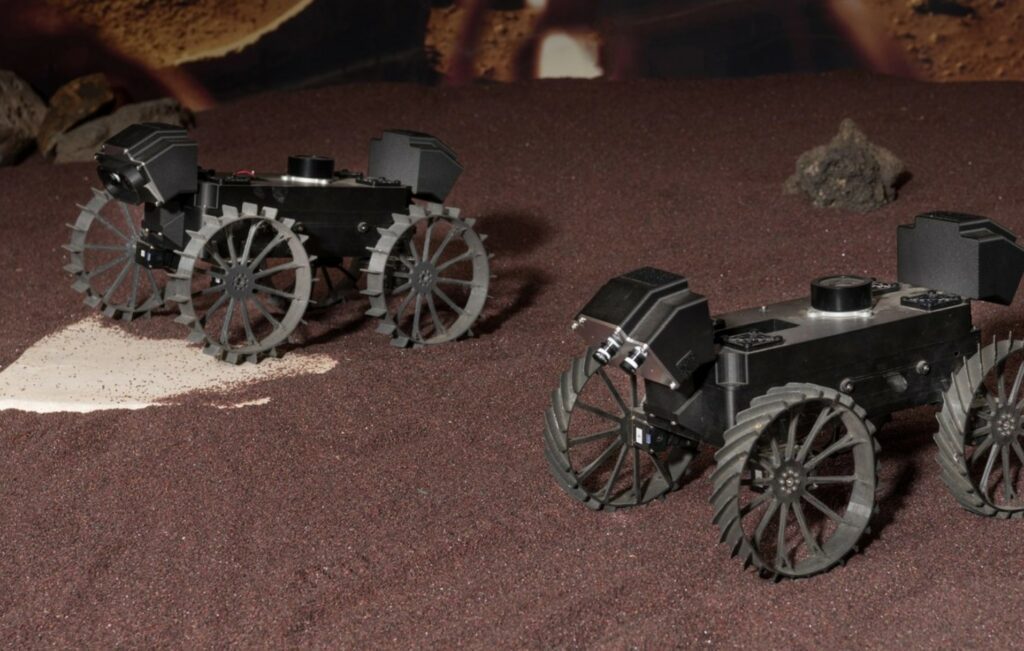
NASA is embarking on a new project called CADRE (Cooperative Autonomous Distributed Robotic Exploration) that will send three miniature rovers to the Moon to map its surface in 3D. These carry-on bag-sized rovers will work together without direct human input, showcasing new technology and paving the way for more efficient and collaborative future missions. The experiment is set to launch in 2024 as part of NASA’s Commercial Lunar Payload Services (CLPS) initiative.
Autonomous Cooperation on the Lunar Surface
CADRE’s primary mission is reportedly to demonstrate the capability of a network of mobile robots to cooperate and accomplish tasks autonomously without human intervention. The rovers will receive a broad directive from mission controllers on Earth and elect a leader amongst themselves to distribute work assignments and achieve collective goals. They will figure out the best and safest ways to complete their assigned tasks, including exploring the lunar surface and maneuvering around obstacles.
Exploring Lunar Terrain
The trio of rovers will undergo several tests while being monitored by a camera on the lander. The first test involves driving in formation using ultra-wideband radios to maintain relative positions and sensors to avoid obstacles. In the second experiment, each rover will independently explore a designated area, creating a topographic 3D map with stereo cameras. Additionally, the project will assess the rovers’ adaptability if one of them encounters technical issues. Successful completion of these tests will highlight the potential of multi-robot missions for exploring hazardous yet scientifically rewarding terrain.
Ground-Penetrating Radar Technology
Though CADRE is not primarily focused on scientific experimentation, the rovers will carry multistatic ground-penetrating radars. Working in formation, the rovers will create a 3D image of the subsurface up to 33 feet below the lunar surface. This collaborative approach will enable the collection of data which would be impossible for a single robot to achieve. The goal is to surpass the capabilities of existing ground-penetrating radars, like the one on NASA’s Perseverance Mars rover.
Surviving the Lunar Environment
CADRE’s rovers face the challenge of surviving the harsh thermal environment near the Moon’s equator. With midday temperatures of up to 237 degrees Fahrenheit, the compact and lightweight rovers must be robust enough to endure these conditions. To prevent overheating, the rovers will employ 30-minute wake-sleep cycles. During downtime, they will cool off and recharge their batteries, while mesh radio networks will help the rovers stay connected and elect a leader for their next exploration round.
The CADRE project represents a significant step forward in autonomous lunar exploration. By demonstrating the successful cooperation of rovers without direct human input, NASA is paving the way for more efficient and collaborative future missions. The technology showcased in CADRE may revolutionize how we explore the Moon and other celestial bodies, making multi-robot missions a promising option for future space exploration endeavors.