
Google researchers are driving the development of agile-legged robots by introducing the Barkour agility benchmark. This benchmark measures robot mobility and encourages the development of versatile locomotion controllers
Achieving robust and dynamic locomotion capabilities in robots, akin to animals or humans, has long been a sought-after objective in the robotics community. Not only does agility allow legged robots to efficiently complete tasks, but it also enables them to navigate complex environments that would otherwise be challenging. Google researchers have been at the forefront of pursuing agility across various robot designs and configurations. However, despite enabling robots to overcome certain obstacles through hiking or jumping, there is currently no widely accepted benchmark that comprehensively measures robot agility and mobility. In contrast, benchmarks have proven instrumental in driving the advancement of machine learning fields like computer vision (e.g., ImageNet) and reinforcement learning (e.g., OpenAI Gym).
A Benchmark for Quadruped Robot Agility
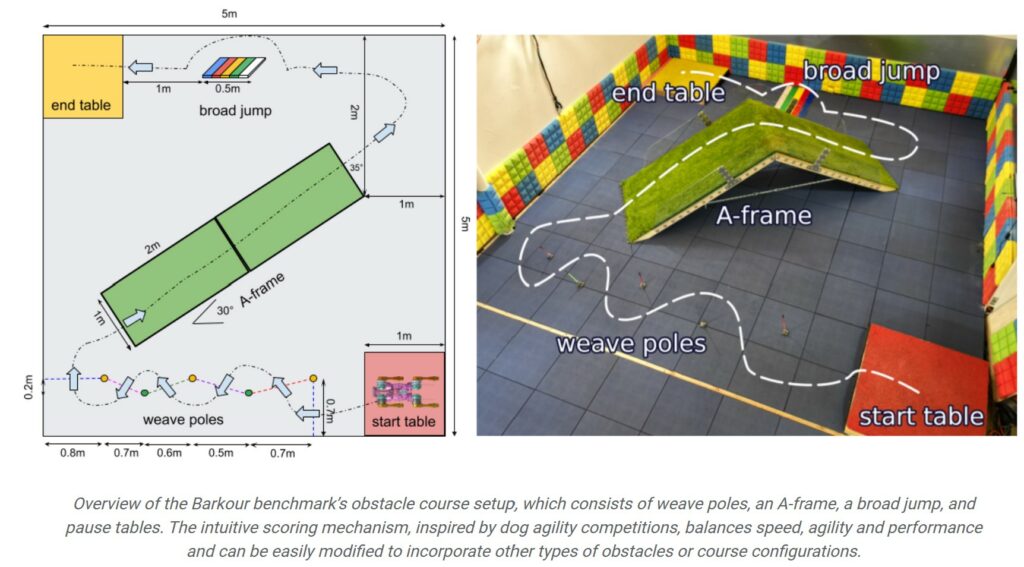
Inspired by the captivating world of dog agility competitions, the Barkour benchmark assesses a legged robot’s ability to sequentially perform a wide range of skills within a limited timeframe. These skills include multidirectional movement, traversing uneven terrains, and successfully jumping over obstacles. By offering a diverse and challenging obstacle course, the Barkour benchmark encourages researchers to develop locomotion controllers that exhibit both speed and versatility.
Enhancing Comparability with Animal Performance
One notable aspect of the Barkour benchmark is its intuitive metric, which relates robot performance to that of animals. By benchmarking robot performance against real dog capabilities, we provide a tangible and relatable measure to evaluate the agility of robots compared to their animal counterparts. This novel approach allows researchers and practitioners to better understand the gap between current robot performance and the agility exhibited by animals.
Comparable Research and Influences
The development of the Barkour benchmark draws inspiration from existing benchmarks that have revolutionized their respective fields. For instance, ImageNet, a widely renowned benchmark for computer vision, has significantly advanced the state-of-the-art in image recognition tasks. Similarly, OpenAI Gym, a benchmark for reinforcement learning, has driven progress in the field by providing standardized environments and evaluation metrics. The Barkour benchmark aspires to achieve a similar impact in the domain of robot agility by providing a standardized evaluation platform and a comprehensive set of challenges.
The introduction of the Barkour agility benchmark marks a stride towards developing agile and versatile-legged robots. By combining a challenging obstacle course with a Transformer-based generalist locomotion policy, this benchmark incentivizes researchers to push the boundaries of robot mobility. The intuitive metric, based on real dog performance, further enhances the understanding of robot agility in relation to animals. As with benchmarks in other domains, Barkour has the potential to catalyze breakthroughs in the development of machine learning algorithms and contribute to the advancement of legged robot locomotion.