
Researchers at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have developed a groundbreaking method for manufacturing soft robots using 3D knitting technology. This new approach allows for the holistic “printing” of entire soft robots, providing numerous advantages over traditional manufacturing techniques.
Soft robotics offer inherent safety features due to their use of soft materials and motions powered by inflating and deflating air chambers. This makes them ideal for fragile environments or working in close proximity to humans. Additionally, their flexibility enables them to fit into tight spaces. Textiles have become a popular choice for constructing soft robots, particularly wearables. However, the conventional “cut and sew” methods of manufacturing have proven to be less than optimal.
The team at Harvard SEAS aimed to overcome the limitations of traditional manufacturing techniques by leveraging 3D knitting. By adapting this technology, they could seamlessly produce textile-based soft robots with minimal material waste. To automate the knitting process, the researchers collaborated with knitting experts from the Rhode Island School of Design, Parsons School of Design, and the Fashion Institute of Technology. They also developed software to direct the knitting equipment, even those that were several decades old, in creating complex structures using various types of yarns.
One of the major advantages of their approach was the use of a “knitout” file format, which described the 3D patterns using general-purpose programming languages. This allowed other groups with different knitting machines to use and build upon the same patterns without extensive translation efforts.
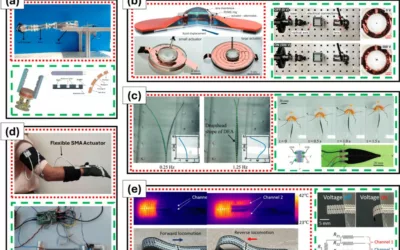
To understand the impact of various knitting parameters on the mechanical properties of the resulting material, the team conducted a series of experiments. They tested different combinations of yarn, structure, and more, and characterized how different knit architectures affected folding and unfolding, structural geometry, and tensile properties. This comprehensive library of knowledge about knitting parameters laid the foundation for the creation of diverse soft robot prototypes. These included gripper devices with bending and grasping appendages, a multi-chamber claw, an inchworm-like robot, and a snake-like actuator capable of lifting objects much heavier than itself.
By developing this innovative approach to additive manufacturing, the researchers believe that 3D knitting can revolutionize the field of soft robotics. The ability to create reconfigurable and redeployable soft robots opens up new possibilities and applications. The team envisions that programmable textiles, similar to fiber-reinforced composites in high-performance aircraft and automobiles, will significantly impact the way soft robots are made.
This breakthrough in soft robotics manufacturing has the potential to transform industries and pave the way for a new generation of adaptable and versatile robots.