
Soft robotics has become a hot topic in recent years, with engineers creating a wide range of flexible machines for a variety of purposes, from exploration to space. Soft robots are inspired by the way animals move, and a team of researchers at MIT has now developed SoftZoo, a bio-inspired platform for co-designing robots that enables engineers to study soft robots’ behavior in different environments. This article explores SoftZoo’s capabilities, compares it to other soft robotics platforms, and examines its potential applications.
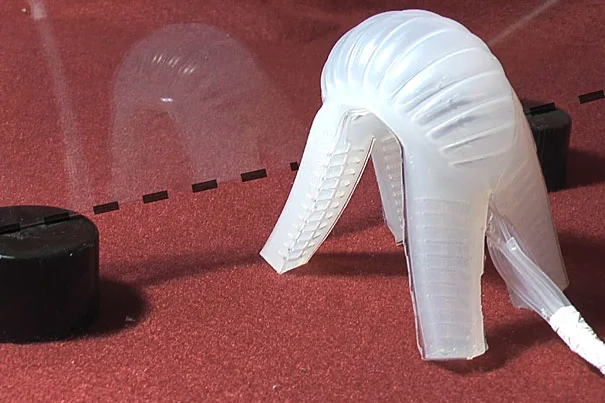
The SoftZoo platform, developed by MIT researchers, offers 3D models of animals such as panda bears, fishes, sharks, and caterpillars as designs that can simulate soft robotics tasks, including locomotion, agile turning, and path following. The platform optimizes co-design by reducing the number of expensive simulations required to solve computational control and design problems. The system’s ability to simulate interactions with different terrain illustrates the importance of morphology, which studies the shapes, sizes, and forms of different organisms. Some biological structures are more optimal than others, depending on the environment, much like comparing blueprints for machines that complete similar tasks.
Compared to similar platforms that simulate design and control, SoftZoo is more comprehensive because it models movement that reacts to the physical features of various biomes. The framework’s versatility comes from a differentiable multiphysics engine, which allows for the simulation of several aspects of a physical system simultaneously. With SoftZoo, designers can develop the robot’s brain and body simultaneously, co-optimizing both terrestrial and aquatic machines to be more aware and specialized.
SoftZoo’s designers are eyeing applications in human mechanics, such as manipulation, given its ability to test robotic control. To demonstrate this potential, the team designed a 3-D arm throwing a snowball forward. By including the simulation of more human-like tasks, soft robotics designers could then use the platform to assess soft robotic arms that grasp, move, and stack objects.
While the SoftZoo platform offers many advantages, current fabrication techniques stand in the way of bringing these soft robot designs to life. The muscle models, spatially varying stiffness, and sensorization in SoftZoo cannot be straightforwardly realized with current fabrication techniques, so the researchers are working on these challenges.
SoftZoo provides an open-source simulation for soft robot designers, helping them build real-world robots much more easily and flexibly while accelerating the machines’ locomotion capabilities in diverse environments. It is essential to note that before any type of robot is constructed, the framework could be a substitute for field testing unnatural scenes. For example, assessing how a bear-like robot behaves in a desert may be challenging for a research team working in the urban plains of Boston. Instead, soft robotics engineers could use 3-D models in SoftZoo to simulate different designs and evaluate how effective the algorithms controlling their robots are at navigation. In turn, this would save researchers time and resources.
SoftZoo is still in its early stages of development, and there is still much to learn about its capabilities. However, the platform’s co-design capabilities and the ability to optimize locomotion make it a promising tool for designing soft robots. As the researchers work to overcome the limitations of current fabrication techniques, SoftZoo may become an essential tool for soft robotics designers, helping to accelerate the development of robots that can operate effectively in diverse environments.